Tacho System
ရှေ့အပိုင်းတွေမှာ MPC အကြောင်း၊ Hydraulic power supply (HPS) Unit နဲ့ Hydraulic Cylinder Unit အကြောင်းကို ပြောခဲ့ပြီးပါပြီ။ MPC တွေက သူတို့ သက်ဆိုင်ရာ function အလိုက် Control and monitoring လုပ်မယ်၊ HPS က control function အတွက် လိုအပ်တဲ့ Hydraulic oil pressure ကို ပံ့ပိုးမယ်၊ HCU တွေက Cylinder Unit အလိုက် Exhaust valve operation၊ Fuel injection နဲ့ cylinder lubrication တို့ ကို လုပ်ဆောင်မယ်ဆိုတာတွေ ဖော်ပြခဲ့ပါတယ်။ ဒီလိုတွေ လုပ်ဆောင်ဖို့အတွက် Crank Shaft position ကိုသိဖို့ လိုအပ်ပါတယ်။ အဲဒီအတွက် Tacho system က တာဝန်ယူပါတယ်။
Tacho system မှာ Tacho system A နဲ့ B ဆိုပြီး နှစ်မျိုးပါ ပါတယ်။ Tacho A က ECU A ဆီက Power ယူပြီး tacho signal က ECU A ထဲ ဝင်ပါတယ်။ Tacho B က ECU B ဆီက power ယူပြီး tacho signal ကို ECU B ကို ပြန်ပေးပါတယ်။ ဒါ့အပြင် Tacho A နဲ့ Tacho B နှစ်ခုလုံးက CCU တွေဆီ tacho signal ပို့ပေးပါတယ်။ အဲဒီတော့ Tacho system နှစ်ခုထဲက တစ်ခု Fail ဖြစ်ခဲ့ရင် ကျန်တဲ့တခုဆီကနေ CCU နဲ့ ECU တို့က Crank Shaft Position ကို ရယူနေမှာ ဖြစ်မှာပါတယ်။ တကယ်လို့ Tacho system နှစ်ခုလုံး က fail ဖြစ်ခဲ့ရင်တော့ Crank shaft position ကို မသိနိုင်တော့တဲ့အတွက် Fuel injection, exhaust valve operation တို့ကို လုပ်ဆောင်လို့ မရတော့ဘဲ Engine Shut Down ဖြစ်မှာပါ။
Tacho system တစ်ခုမှာ Angle Encoder နဲ့ Amplifier တစ်ခုစီပါဝင်ပါတယ်။ Angle Encoder က Crankshaft နဲ့ ချိတ်ဆက်ထားတဲ့ ဝင်ရိုး /crankshaft pin ပေါ်မှာ တပ်ဆင်ထားပါတယ်။ အဲဒီဝင်ရိုးက Engine ရဲ့ အရှေ့ပိုင်းမှာ ရှိပြီးတော့ ဝင်ရိုးပေါ်မှာ Engine နဲ့ ကပ်လျက်ရှိနေတဲ့ Encoder က Encoder A ဖြစ်ပြီး အပြင်က Encoder B ဖြစ်ပါတယ်။ အဲဒီအတွက် တကယ်လို့ Encoder A ကို လဲရမယ်ဆိုရင် Encoder B ကိုပါ ဖြုတ်ရမှာ ဖြစ်ပါတယ်။ Encoder မှာ ရဲ့ ဝင်ရိုးက အလယ်မှာ အခေါင်းပေါက် ဖြစ်ပြီး သူက Crankshaft pin ပေါ် စွပ်ထားတာပါ။ Vibration ကို လျော့ချဖို့ Flexible ring တွေကို Encoder တွေကြားမှာ ထည့်ထားပါတယ်။

Encoder တည်ဆောက်ပုံ
Encoder A နဲ့ B နှစ်ခုလုံးက တည်ဆောက်ပုံ အတူတူပဲ ဖြစ်ပါတယ်။ Encoder တစ်ခုမှာ stationary part နဲ့ rotating part နှစ်ခုရှိပြီး rotating part က ခုနက အပေါ်မှာ ဆိုခဲ့သလို Crankshaft pin မှာ စွပ်ထားတာပါ။ Stationary part မှာတော့ Marker sensor နှစ်ခုနဲ့ Quadrature sensor နှစ်ခုစီပါ ပါတယ်။ Encoder A နဲ့ B ကွာခြားချက်က rotating part ကို Crankshaft ပေါ် အထိုင်ချတဲ့ position မတူတာပဲ ဖြစ်ပါတယ်။
Encoder A ကို နမူနာ ထား ကြည့်ကြပါမယ်။ Fig 76 မှာ Encoder A ကို ပြထားပါတယ်။ stationary part မှာ Marker Master A (MMA) ၊ Marker Slave A (MSA)၊ Quadrature 1 A (Q1A) နဲ့ Quadrature 1 B (Q2B) တို့ကို တွေ့ရပါမယ်။ Rotating part မှာ semi circular (စက်ဝိုင်းခြမ်း) တစ်ခုနဲ့ Gear wheel တစ်ခု တွေ့ရပါမယ်။ gear wheel မှာ Gear သွား 360 ပါရှိပါတယ်။ MMA နဲ့ MSA တို့က စက်ဝိုင်းခြမ်းကို အာရုံခံတာ ဖြစ်ပြီး၊ Q1A နဲ့ Q2B တို့က Gear သွားကို အာရုံခံတာ ဖြစ်ပါတယ်။ MMA နဲ့ MSA တို့က တစ်ခုနဲ့ တစ်ခု 90 deg အကွာမှာ ရှိပါတယ်။ No.1 cylinder ရဲ့ 0 degTDC (Top Dead Center) ရောက်တဲ့အခါ MMA က စက်ဝိုင်းခြမ်း ကို စတွေ့ရမှာပါ။ ဘယ်အထိလဲဆိုတော့ (0+180) 180 deg ATDC (After Top Deat Center) ရောက်တဲ့အထိပါ။ 90 deg ATDC ကနေ 270 deg (90+180 deg) ATDC အထိ MSA က စက်ဝိုင်းခြမ်းကို တွေ့ detect လုပ်ပါမယ်။ Encoder အသစ်လဲရတဲ့အခါ ဒီလိုမျိုး ရအောင် Encoder ရဲ့ shaft ကို လှည့်ပြီး ချိန်ပေးရတာပါ။ နောက်မှာ အသေးစိတ် ထပ်ရှင်းပါ့မယ်။

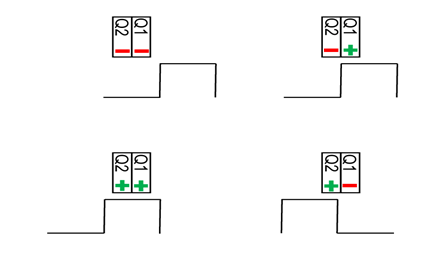
အဲဒီလို စက်ဝိုင်းခြမ်းကို MMA နဲ့ MSA က အာရုံခံပြီး Crankshaft ရဲ့ position ကို အကြမ်းဖျင်းသိရပါတယ်။ ဥပမာ MMA က ON ၊ MSA က OFF ဆိုရင် crank shaft က no.1 cylinder ရဲ့ 0 deg TDC နဲ့ 89 deg ATDC (After Top Dead Cnenter) ကြား ရှိနေမှာ ဖြစ်ပါတယ်။ MMA , MSA နှစ်ခုလုံး ON ဆိုရင် 90 deg နဲ့ 179 deg ကြား စသဖြင့် သိနိုင်ပါတယ်။ အဲလို အကြမ်းဖြင်းကနေ position deg အတိအကျ သိဖို့အတွက် Quadrature sensors တွေက တာဝန်ယူပါတယ်။
Encoder ရဲ့ rotating part မှာ semi circular ring နဲ့ Gear သွား ၃၆၀ ပါရှိတဲ့ gear wheel တစ်ခု ပါရှိတယ်လို့ ရှေ့မှာ ဖော်ပြခဲ့ ပြီး ဖြစ်ပါတယ်။ Encoder တစ်ခုမှာ Quadrature sensor နှစ်ခုက တွဲလျက် ရှိပါတယ်။ Quadrature sensor တွေက Gear သွားကို အာရုံခံမိတဲ့အခါ ON မှာ ဖြစ်ပါတယ်။ Gear wheel မှာ gear သွား 360 ပါတဲ့အတွက် Gear သွား တစ်ခုနဲ့ တစ်ခု အကွာအဝေးက 1 deg ဖြစ်ပါတယ်။ Fig 77 ကို ကြည့်ရင် Quadrature sensor နှစ်ခုက 1 deg အကွာအဝေး (gear သွား တစ်ခုနဲ့ တစ်ခုကြား) ကို လေးပုံတစ်ပုံ အထိ အသေးစိတ်တိုင်း နိုင်တာ တွေ့ရပါမယ်။ Engine ရပ်ထားတဲ့အချိန် Engine control system က crank shaft position မသိသေးပါဘူး။ Engine နှိုးဖို့ Air run စလုပ်ပြီး 3-4 revolution ရပြီးတဲ့နောက် Encoder ရဲ့ MMA (Marker Master A) က semi circular ring / စက်ဝိုင်းခြမ်းကို စ တွေ့တာနဲ့ counting စပါတယ်။ အဲ့အချိန်မှာ Quadrature sensor တွေကလည်း Gear သွား ဘယ်နှခု ဖြတ်သွားလဲ စ တွက်ပါတယ်။ ဒီလိုနည်းနဲ့ Crank shaft ရဲ့ Deg position အတိအကျ ကို Engine Control System က သိရှိပြီး Fuel injection၊ Exhaust valve operation တို့ကို စတင် လုပ်ဆောင်ပါတယ်။

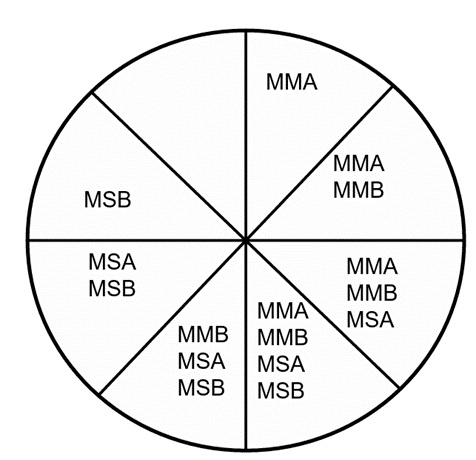
Encoder B ကလည်း ဒီနည်းအတိုင်း လုပ်ဆောင်တာဖြစ်ပါတယ်။ သူ့မှာလည်း Encoder A လို Maker sensor နှစ်ခုနဲ့ Quadrature Sensor နှစ်ခုတို့ ပါရှိတယ်။ Marker Master B (MMB)၊ Marker Slave B (MSB)၊ Quadrature 1 B နဲ့ Quadrature 2B ဆိုပြီး သတ်မှတ်ထားပါတယ်။ သူ့ရဲ့ Marker sensor တွေကိုတော့ No.1 Cylinder ရဲ့ 45 deg ATDC (after top dead centre) နဲ့ 135 deg (45+90) ATDC မှာ နေရာချထားပါတယ်။ အဲဒီတော့ crank shaft ကလည်နေရင်းနဲ့ 45 deg နဲ့ 134 deg ATDC ကြားဆို MMB က ON မှာပါ။ MMB ရော MSB ရော ON မယ်ဆိုရင် 134 deg နဲ့ 225 deg ATDC ကြားရောက်နေပါမယ်။ Fig 79 မှာ No.1 cylinder unit ရဲ့ crank shaft deg position အလိုက် Marker sensor တွေ activate ဖြစ်ပုံ ကို ပြထားပါတယ်။
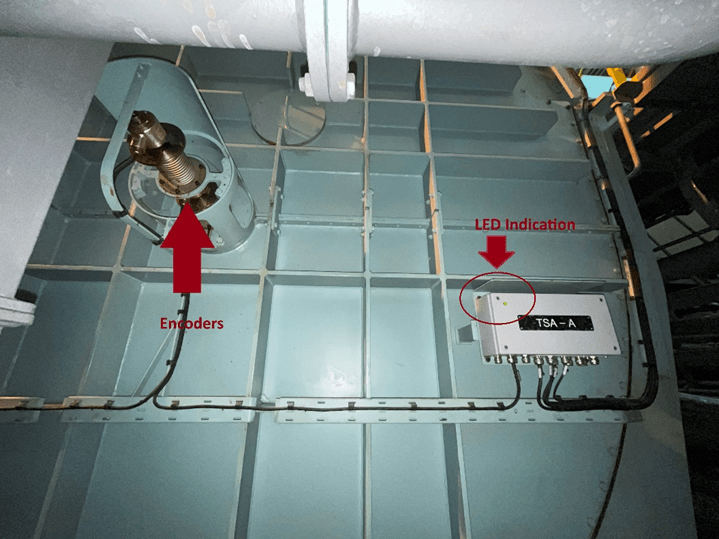
Encoder တွေက Amplifier unit တွေကဆင့် CCU တွေနဲ့ ECU MPC တွေဆီ Tacho signal ပို့ပေးတာပါ။ Amplifier unit က TSA- A နဲ့ TSA-B ဆိုပြီး ရှိပါတယ်။ Encoder A က TSA-A နဲ့ ဆက်ထားပြီး Encoder B က TSA-B နဲ့ပါ။ Encoder တွေရဲ့ Maker Master sensor တွေ activate ဖြစ်တဲ့အခါ သက်ဆိုင်ရာ amplifier box တွေပေါ်က LED မီးလင်းတာ မြင်ရပါမယ်။ အပေါ်မှာ ဖော်ပြခဲ့တဲ့ Encoder အလုပ်လုပ်ပုံ ပြန်ကြည့်ရင် Maker sensor တွေဟာ 360 deg တစ်ပတ်မှာ တစ်ခေါက် activate ဖြစ်တာ တွေ့ရပါမယ်။ ဥပမာ အနနဲ့ Marker Master A ကို ကြည့်ပါမယ်။ No.1 Cylinder 0 deg TDC မှာ သူ စပြီး activate ဖြစ်ပါမယ်။ ဘယ်အချိထိလဲဆိုတော့ semi circular ring သူ့ကို ဖြတ်ပြီးသွားတဲ့အထိပါ။ အဲဒီတော့ 180 deg ATDC အထိ သူ activate ဖြစ်မှာပါ။ 180 deg ကျော်ရင် သူ နောက်တခေါက် 0 TDC ရောက်တဲ့အထိ OFF နေမှာပါ။ TSA-A ပေါ်က LED မီး တစ်ခေါက် လင်း သွားတိုင်း MMA တစ်ခေါက် activate ဖြစ်ကြောင်း သိနိုင်ပါတယ်။
Encoder တွေအပြင် Engine Flywheel မှာ semi circular ring တစ်ခု တပ်ထားပြီးတော့ No.1 cylinder 0 deg TDC position မှာ Reference marker sensor တစ်ခု တပ်ထားပါတယ်။ သူက Marker sensor တွေ တိုင်းတာ မှန် မမှန် cross check လုပ်ဖို့ ဖြစ်ပါတယ်။ ပြီးတော့ သတိပြုဖို့က Encoder A က MMA (Marker Master A) က တိုင်းတာ ကို မယူဘဲ Reference marker က တိုင်းတာကိုပဲ Engine control system ဆီ ပို့ပါတယ်။

Encoder လဲလှယ်ခြင်း
Encoder နဲ့ပတ်သက်ပြီး Failure alarm လာရင် တခါတရံ cable connection တွေ ပြန်စစ် ပြန်ကြပ် ပေးတာရုံနဲ့ အဆင်ပြေတတ်တာ ရှိသလို Encoder တကယ်ပျက်လို့ Failure alarm လာတာ လည်း ရှိပါတယ်။ Encoder တစ်လုံးပျက်သွားရင် ကျန် တစ်လုံးက Redundancy အနေနဲ့ ရှိနေမှာ ဖြစ်ပေမယ့် အဲဒီကျန်တစ်လုံးပါ ထပ်ပျက်ရင် Engine shut down ဖြစ်မှာပါ။ Encoder တစ်လုံးပျက်နေတာ မလဲဘဲ ရှိတဲ့ တစ်လုံးနဲ့ နေရင်းက ကျန်တစ်လုံးပါ ပျက်ပြီး Off hire ဖြစ်တဲ့ incident တွေ ရှိပါတယ်။ Encoder ယူနစ်တွေက အရေးကြီးတာမို့ သင်္ဘောတော်တော်များများမှာ မရှိမဖြစ် ဆောင်ထားကြပါတယ်။ လဲရမယ်ဆိုရင်လည်း အချိန်မဆိုင်းဘဲ အဆင်ပြေတာနဲ့ လဲဖို့ ဆောင်ရွက်သင့်ပါတယ်။
Encoder လဲပြီး ပြန်ချိန်တာက ကျွန်တော် အပေါ်မှာ ပြောခဲ့တဲ့ Encoder ထဲက sensor တွေ နေရာချပုံကို နားလည်ထားရင် မခက်ခဲပါဘူး။ ရှေ့မှာ ဖော်ပြခဲ့သလို Encoder A က Engine နဲ့ ကပ်လျက် မှာ ရှိတာ ကြောင့် Encoder A သာ လဲရမယ်ဆိုရင် Encoder B ကို ပါ ဖြုတ်မှ ရပါမယ်။
ဥပမာ အနေနဲ့ Encoder A လဲရတာ ကို ပြောပြပါမယ်။ Encoder တွေရဲ့ ဝင်ရိုးက crank shaft pin မှာ စွပ်ထားပြီး Clamping ring နဲ့ ကြပ်ထားတာပါ။ Encoder plug ဖြုတ်ပြီး ရင် clamp ring ကို လျော့၊ အထိုင် bolts တွေကို ဖြုတ်ပြီး Encoder ကို ဆွဲဖြုတ်ရပါမယ်။ Encoder A ကို လဲမှာဆိုတော့ Encoder B ကို ဖြုတ်ပြီး ရင် Encoder A ကို ဆက်ဖြုတ်ပါမယ်။
အသစ် ပြန်တပ်တဲ့အခါ Encoder A ကို အရင် တပ်ပါမယ်။ ပြန် မတပ်ခင် Crank shaft ကို 0 deg TDC position မှာ ထား ရပါမယ်။ ဘာလို့လဲဆိုတော့ Encoder A ရဲ့ Marker Master A / MMA က 0 deg TDC မှာ စ ON တာမို့လို့ပါ။ ပြီးရင် Encoder A ကို တပ်ပါမယ်။ ဒီနေရာမှာ Encoder A ရဲ့ MMA က ON နေလား OFF နေလား သိဖို့ TSA-A က LED ကို ကြည့်ရပါမယ်။ ပြန်တပ်တဲ့အခါ LED က ON နေရင် Encoder A ရဲ့ semi circular ring က 0 deg TDC နဲ့ 180 deg ATDC ကြားမှာ ရှိနေတဲ့ သဘောပါ။ LED OFF နေရင်တော့ 180 deg ATDC နဲ့ 0 deg TDC ကြားမှာ ရှိနေပါမယ်။ ကျွန်တော်တို့ လုပ်ရမှာက semi circular ring ကို ahead direction နဲ့ လှည့်ရင် ring ရဲ့ အစက 0 deg TDC position မှာ ရှိနေစေဖို့ပါ။ အဲဒီတော့ LED လင်းသည် ဖြစ်စေ ၊မလင်းသည် ဖြစ်စေ Encoder A ရဲ့ shaft ကို လက်နဲ့ ahead direction အတိုင်း ဖြည်းဖြည်းလှည့်ပါမယ်။ တကယ်လို့ LED က မလှည့်ခင်က ON နေတယ်ဆိုရင် OFF သွားတဲ့အချိန်မှာ semi circular ring က 180 deg ATDC ကို စဖြတ်နေပြီလို့ သိရပါမယ်။ ဒီလို နဲ့ LED off နေရာကနေ ပြန် ON တဲ့အခါမှာတော့ semi circular ring က 0 deg TDC ကို ရောက်နေပါပြီ။ အဲဒီနောက်မှာ Encoder shaft ကို နောက်ကို LED Off တဲ့အထိ ပြန်လှည့်ရပါမယ်။ LED off တာ နဲ့ ရပ်ပြီး ရှေ့ကို ဖြည်းဖြည်း ပြန်လှည့်ရပါမယ်။ LED ON တာနဲ့ တပြိုင်နက် ရှေ့ကို လှည့်နေတာ ရပ်ရပါမယ်။
ပြီးရင်တော့ clamping ring ကို သေချာ ပြန်ကြပ်ပြီး Encoder B ဆက် လဲလို့ရပါပြီ။ Encoder B ကို ပြန်ချိန်တဲ့အခါမှာတော့ Crank shaft ကို 45 deg ATDC ပြန်ထားရပါမယ်။ ဘာလို့လဲဆိုတော့ Encoder B ရဲ့ Maker Master B က 45 deg ATDC မှာ စ ON လို့ပါ။ သူ့ကိုလည်း ခုနက Encoder A ချိန် သလို ပြန်ချိန်ပြီး Clamping ring ပြန်ကြပ် ပေးရပါမယ်။
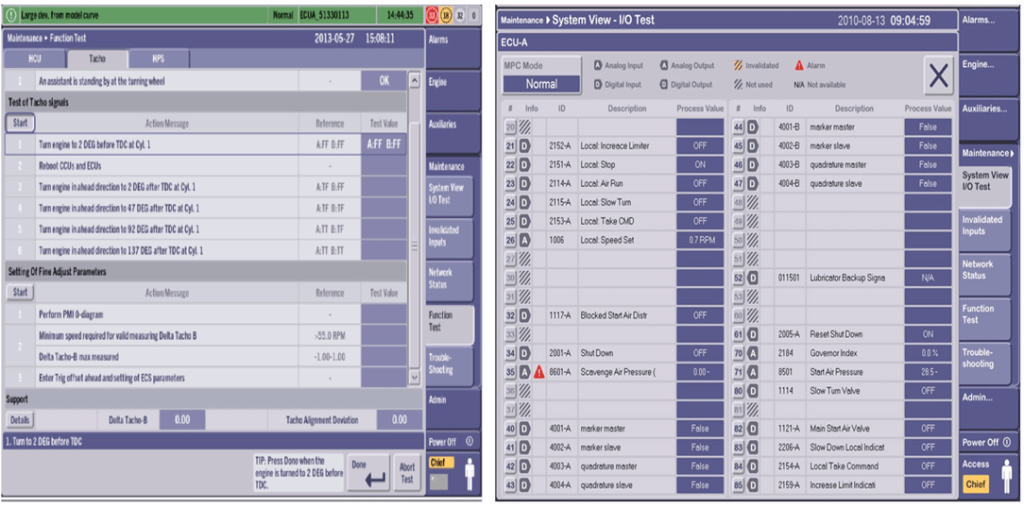
အကုန်လုံး ပြီးသွားတဲ့အခါ MOP panel ရဲ့ system I/O view ထဲမှာ Encoder တွေရဲ့ signal ရောက်မရောက် သွားစစ်ရပါမယ်။ Encoder က ECUs နဲ့ CCUs ထဲ ဝင်တာမို့ သူတို့ရဲ့ I/O view ထဲ ဝင်ကြည့်ရမှာပါ။ ပြီးရင် Maintenance menu ထဲ က Function test ကနေပြီးတော့ Encoder တွေရဲ့ function ကို စစ်ဆေးရပါမယ်။ Function test မှာ သူပြောထားတဲ့ Instruction တွေအတိုင်း Engine ကို Turning gear ကနေ လှည့်ပေးပြီး Encoder တွေ အလုပ် လုပ်တာ မှန်မမှန် စစ်တာပါ။ အဲဒါပြီးရင်တော့ Encoder လဲတာ ပြီးပြီ ဖြစ်ပါတယ်။
References
1) Hyundai-Man B&W Diesel Engine Main Engine Manual Volume II
2) MAN Diesel PrimeServ Academy
(This overview of ME Engine Control Systems is intended solely for educational purposes and knowledge sharing. It is not designed for commercial publication or professional use. The information provided aims to offer a general introduction to ME Engine Control Systems for those unfamiliar with the topic.
Please be aware that this overview is based on specific ME engines encountered and reflects current technology as of the date of writing. Due to the evolving nature of technology, there may be gaps, discrepancies, or inaccuracies in the information presented.
For the most accurate and up-to-date information, further research and consultation with industry experts are recommended. Corrections, additional insights, and feedback from the community are welcome to enhance the accuracy and usefulness of this material.)

Leave a comment